Autoregressive moving average
[1]:
# Import auxiliary libraries for demonstration
import matplotlib as mpl
import matplotlib.pyplot as plt
import numpy as np
plt.rcParams[ "figure.figsize" ] = [ 5, 4 ]
plt.rcParams[ "figure.dpi" ] = 80
plt.rcParams[ "font.family" ] = "Times New Roman"
plt.rcParams[ "font.size" ] = '14'
Normal autoregressive (AR) model
Autoregressive model is a random process describing the time-varying procedure in which the output depends on the previous values. The p-th order autoregressive model can be expressed by the following equation,
where \(X_t\) is the observed values; \(\phi_i\) is the coefficient; \(\epsilon_t\) is the white noise. For normal autoregressive mode, \(\epsilon_t\) follows the normal distribution.
Therefore, in order to generate the data of the autoregressive model, the initial observed values and corresponding coefficients should be provided. The distribution for \(\epsilon_t\) can be different based on the model choice.
Function arNormal implements the autoregressive model with normal distributed white noise for arbitrary order. The order depends on the length of the initial observed values.
Function help
[2]:
from ffpack.lsg import arNormal
help( arNormal )
Help on function arNormal in module ffpack.lsg.autoregressiveMovingAverage:
arNormal(numSteps, obs, phis, mu, sigma, randomSeed=None)
Generate load sequence by an autoregressive model.
The white noise is generated by the normal distribution.
Parameters
----------
numSteps: integer
Number of steps for generating.
obs: 1d array
Initial observed values.
phis: 1d array
Coefficients for the autoregressive model.
mu: scalar
Mean of the white noise.
sigma: scalar
Standard deviation of the white noise.
randomSeed: integer, optional
Random seed. If randomSeed is none or is not an integer, the random seed in
global config will be used.
Returns
-------
rst: 1d array
Generated sequence includes the observed values.
Raises
------
ValueError
If the numSteps is less than 1.
If lengths of obs and phis are not equal.
Examples
--------
>>> from ffpack.lsg import arNormal
>>> obs = [ 0, 1 ]
>>> phis = [ 0.5, 0.3 ]
>>> rst = arNormal( 500, obs, phis, 0, 0.5 )
Example with first order AR model
[3]:
obs = [ 0 ]
phis = [ 0.5 ]
arn1stResults = arNormal( 500, obs, phis, 0, 0.5, randomSeed=2023 )
[4]:
fig, ax = plt.subplots()
ax.plot( np.array( arn1stResults ) )
ax.tick_params(axis='x', direction="in", length=5)
ax.tick_params(axis='y', direction="in", length=5)
ax.set_ylabel( "X" )
ax.set_xlabel( "T" )
ax.set_title( "Autoregressive model ( AR1 )" )
plt.tight_layout()
plt.show()

Example with second order AR model
[5]:
obs = [ 0, 0 ]
phis = [ 0.5, 0.3 ]
arn2ndResults = arNormal( 500, obs, phis, 0, 0.5, randomSeed=2023 )
[6]:
fig, ax = plt.subplots()
ax.plot( np.array( arn2ndResults ) )
ax.tick_params(axis='x', direction="in", length=5)
ax.tick_params(axis='y', direction="in", length=5)
ax.set_ylabel( "X" )
ax.set_xlabel( "T" )
ax.set_title( "Autoregressive model ( AR2 )" )
plt.tight_layout()
plt.show()

Normal moving average (MA) model
Moving average model is a common method to model the univariate time series. It can be represented by the following equation,
where \(X_t\) is the observed values; \(\theta_i\) is the coefficient; \(\epsilon_t\) are the white noise error term. For normal autoregressive mode, \(\epsilon_t\) follows the normal distribution.
Function maNormal implements the moving average model with normal distributed white noise for arbitrary order. The order depends on the length of the coefficients for the white noise.
Function help
[7]:
from ffpack.lsg import maNormal
help( maNormal )
Help on function maNormal in module ffpack.lsg.autoregressiveMovingAverage:
maNormal(numSteps, c, thetas, mu, sigma, randomSeed=None)
Generate load sequence by a moving-average model.
The white noise is generated by the normal distribution.
Parameters
----------
numSteps: integer
Number of steps for generating.
c: scalar
Mean of the series.
thetas: 1d array
Coefficients for the white noise in the moving-average model.
mu: scalar
Mean of the white noise.
sigma: scalar
Standard deviation of the white noise.
randomSeed: integer, optional
Random seed. If randomSeed is none or is not an integer, the random seed in
global config will be used.
Returns
-------
rst: 1d array
Generated sequence with moving-average model.
Raises
------
ValueError
If the numSteps is less than 1.
If mean of the series is not a scalar.
If the thetas is empty.
Examples
--------
>>> from ffpack.lsg import maNormal
>>> thetas = [ 0.8, 0.5 ]
>>> rst = maNormal( 500, 0, thetas, 0, 0.5 )
Example with first order MA model
[8]:
c = 0
thetas = [ 5 ]
man1stResults = maNormal( 500, c, thetas, 0, 0.5, randomSeed=2023 )
[9]:
fig, ax = plt.subplots()
ax.plot( np.array( man1stResults ) )
ax.tick_params(axis='x', direction="in", length=5)
ax.tick_params(axis='y', direction="in", length=5)
ax.set_ylabel( "X" )
ax.set_xlabel( "T" )
ax.set_title( "Moving average model ( MA1 )" )
plt.tight_layout()
plt.show()

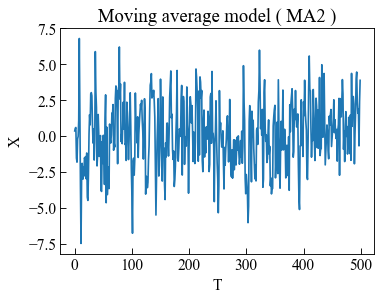
Example with second order MA model
[10]:
c = 0
thetas = [ 2, 4 ]
man2ndResults = maNormal( 500, c, thetas, 0, 0.5, randomSeed=2023 )
[11]:
fig, ax = plt.subplots()
ax.plot( np.array( man2ndResults ) )
ax.tick_params(axis='x', direction="in", length=5)
ax.tick_params(axis='y', direction="in", length=5)
ax.set_ylabel( "X" )
ax.set_xlabel( "T" )
ax.set_title( "Moving average model ( MA2 )" )
plt.tight_layout()
plt.show()
Normal ARMA model
Autoregressive moving average model is a combination of AR model and MA model. It can be represented by the following equation,
where \(X_t\) is the observed values; \(\phi_i\) is the coefficient; \(\theta_i\) is the coefficient; \(\epsilon_t\) are the white noise error term. For normal autoregressive moving average mode, \(\epsilon_t\) follows the normal distribution.
Function armaNormal implements the autoregressive moving average model with normal distributed white noise for arbitrary order. The AR order \(p\) and MA order \(q\) depend on the length of the initial observed values and coefficients for the white noise. It should be noted that the order for AR model and MA model can be different.
Function help
[12]:
from ffpack.lsg import armaNormal
help( armaNormal )
Help on function armaNormal in module ffpack.lsg.autoregressiveMovingAverage:
armaNormal(numSteps, obs, phis, thetas, mu, sigma, randomSeed=None)
Generate load sequence by an autoregressive-moving-average model.
The white noise is generated by the normal distribution.
Parameters
----------
numSteps: integer
Number of steps for generating.
obs: 1d array
Initial observed values, could be empty.
phis: 1d array
Coefficients for the autoregressive part.
thetas: 1d array
Coefficients for the white noise for the moving-average part.
mu: scalar
Mean of the white noise.
sigma: scalar
Standard deviation of the white noise.
randomSeed: integer, optional
Random seed. If randomSeed is none or is not an integer, the random seed in
global config will be used.
Returns
-------
rst: 1d array
Generated sequence includes the observed values.
Raises
------
ValueError
If the numSteps is less than 1.
If the phis is empty.
If the thetas is empty.
Examples
--------
>>> from ffpack.lsg import armaNormal
>>> obs = [ 0, 1 ]
>>> phis = [ 0.5, 0.3 ]
>>> thetas = [ 0.8, 0.5 ]
>>> rst = armaNormal( 500, obs, phis, thetas, 0, 0.5 )
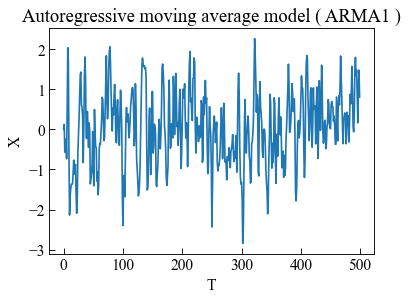
Example with first order ARMA model
[13]:
obs = [ 0 ]
phis = [ 0.5 ]
thetas = [ 0.8 ]
arman1stResults = armaNormal( 500, obs, phis, thetas, 0, 0.5, randomSeed=2023 )
[14]:
fig, ax = plt.subplots()
ax.plot( np.array( arman1stResults ) )
ax.tick_params(axis='x', direction="in", length=5)
ax.tick_params(axis='y', direction="in", length=5)
ax.set_ylabel( "X" )
ax.set_xlabel( "T" )
ax.set_title( "Autoregressive moving average model ( ARMA1 )" )
plt.tight_layout()
plt.show()
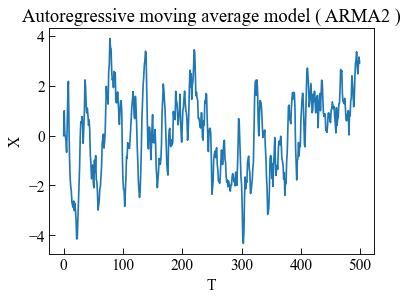
Example with second order ARMA model
[15]:
obs = [ 0, 1 ]
phis = [ 0.5, 0.3 ]
thetas = [ 0.8, 0.5 ]
arman2ndResults = armaNormal( 500, obs, phis, thetas, 0, 0.5, randomSeed=2023 )
[16]:
fig, ax = plt.subplots()
ax.plot( np.array( arman2ndResults ) )
ax.tick_params(axis='x', direction="in", length=5)
ax.tick_params(axis='y', direction="in", length=5)
ax.set_ylabel( "X" )
ax.set_xlabel( "T" )
ax.set_title( "Autoregressive moving average model ( ARMA2 )" )
plt.tight_layout()
plt.show()
Normal ARIMA model
AutoRegressive integrated moving average is the combination of differenced AR model and MA model. It can be represented by the following equation,
where \(X'_t\) is the differenced observed values; \(\phi_i\) is the coefficient; \(\theta_i\) is the coefficient; \(\epsilon_t\) are the white noise error term. For normal autoregressive integrated moving average mode, \(\epsilon_t\) follows the normal distribution.
Function arimaNormal implements the first order differenced ARIMA model with normal distributed white noise. The AR order \(p\) and MA order \(q\) depend on the length of coefficients. It should be noted that the order for AR model and MA model can be different.
Function help
[17]:
from ffpack.lsg import arimaNormal
help( arimaNormal )
Help on function arimaNormal in module ffpack.lsg.autoregressiveMovingAverage:
arimaNormal(numSteps, c, phis, thetas, mu, sigma, randomSeed=None)
Generate load sequence by an autoregressive integrated moving average model.
The white noise is generated by the normal distribution.
First-order diference is used in this function.
Parameters
----------
numSteps: integer
Number of steps for generating.
c: scalar
Mean of the series.
phis: 1d array
Coefficients for the autoregressive part.
thetas: 1d array
Coefficients for the white noise for the moving-average part.
mu: scalar
Mean of the white noise.
sigma: scalar
Standard deviation of the white noise.
randomSeed: integer, optional
Random seed. If randomSeed is none or is not an integer, the random seed in
global config will be used.
Returns
-------
rst: 1d array
Generated sequence with the autoregressive integrated moving average model.
Raises
------
ValueError
If the numSteps is less than 1.
If mean of the series is not a scalar.
If the phis is empty.
If the thetas is empty.
Examples
--------
>>> from ffpack.lsg import arimaNormal
>>> phis = [ 0.5, 0.3 ]
>>> thetas = [ 0.8, 0.5 ]
>>> rst = arimaNormal( 500, 0.0, phis, thetas, 0, 0.5 )
Example with first order ARIMA model
[18]:
c = 0.0
phis = [ 0.1 ]
thetas = [ 2 ]
ariman1stDiffResults = arimaNormal( 500, c, phis, thetas, 0, 0.5, randomSeed=2023 )
ariman1stCumResults = np.cumsum( ariman1stDiffResults )
[19]:
fig, ( ax1, ax2 ) = plt.subplots( 1, 2, figsize=( 10, 4 ) )
ax1.plot( np.array( ariman1stDiffResults ) )
ax1.tick_params( axis='x', direction="in", length=5 )
ax1.tick_params( axis='y', direction="in", length=5 )
ax.set_ylabel( "X'" )
ax.set_xlabel( "T" )
ax1.set_title( "ARIMA1 differenced results" )
ax2.plot( np.array( ariman1stCumResults ) )
ax2.tick_params( axis='x', direction="in", length=5 )
ax2.tick_params( axis='y', direction="in", length=5 )
ax.set_ylabel( "X" )
ax.set_xlabel( "T" )
ax2.set_title( "ARIMA1 cumulative results" )
plt.tight_layout()
plt.show()

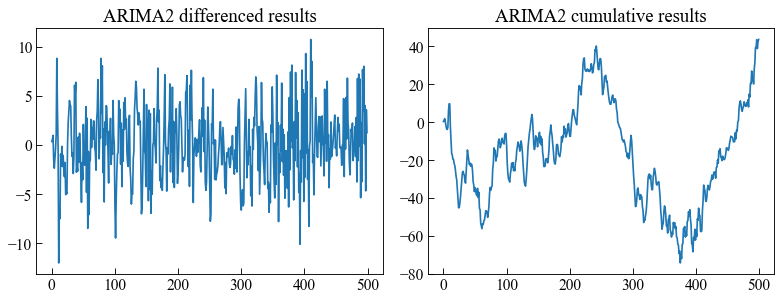
Example with second order ARIMA model
[20]:
c = 0.0
phis = [ 0.1, 0.5 ]
thetas = [ 2, 5 ]
ariman2ndDiffResults = arimaNormal( 500, c, phis, thetas, 0, 0.5, randomSeed=2023 )
ariman2ndCumResults = np.cumsum( ariman2ndDiffResults )
[21]:
fig, ( ax1, ax2 ) = plt.subplots( 1, 2, figsize=( 10, 4 ) )
ax1.plot( np.array( ariman2ndDiffResults ) )
ax1.tick_params( axis='x', direction="in", length=5 )
ax1.tick_params( axis='y', direction="in", length=5 )
ax.set_ylabel( "X'" )
ax.set_xlabel( "T" )
ax1.set_title( "ARIMA2 differenced results" )
ax2.plot( np.array( ariman2ndCumResults ) )
ax2.tick_params( axis='x', direction="in", length=5 )
ax2.tick_params( axis='y', direction="in", length=5 )
ax.set_ylabel( "X" )
ax.set_xlabel( "T" )
ax2.set_title( "ARIMA2 cumulative results" )
plt.tight_layout()
plt.show()